Introduction
The challenge of enabling robots to manipulate a wide variety of objects, especially irregular or delicate ones, has long been a significant hurdle in robotics design. Thanks to a team of scientists from New York University, a promising solution called “eFlesh” has been developed. This 3D-printable, low-cost magnetic tactile sensor aims to improve robotic sensing and grip capabilities. Remarkably, the team has made the designs, files, and code available for the public, allowing anyone with the right equipment to create their own eFlesh sensor grips at home.
What is eFlesh?
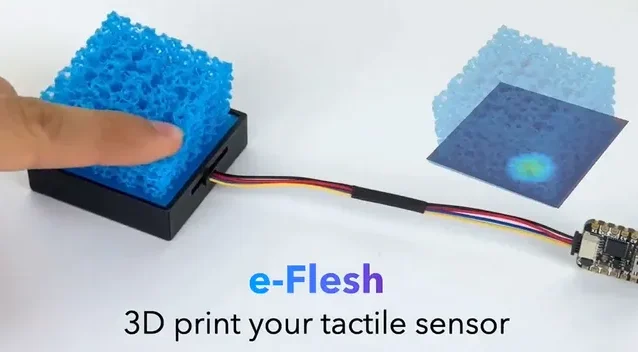
“eFlesh” is a tactile sensor designed to be embedded in robotic grips to provide highly sensitive touch feedback. Unlike traditional sensors, eFlesh combines 3D printing technology with magnetic sensing to detect contact and force with high precision. The sensor’s design enables robots to interact more delicately and effectively with objects, such as eggs, USB devices, and soft plush toys, demonstrating versatility across a variety of materials and shapes.
Production and Materials
The eFlesh sensors are produced using a TPU (thermoplastic polyurethane) filament in a 3D printer, specifically shown using the Bambu Lab X1E model. The printing process involves pausing about half an inch (25mm) from the print bed to insert a grid of magnets, this array is critical to eFlesh’s tactile sensing capability. The approach is noted to be quick and easy, facilitating rapid production of these advanced sensors without the need for specialized industrial equipment.
Technical Specifications and Performance
The NYU researchers report impressive technical performance:
- Contact localization accuracy of 0.5 mm
- Force prediction errors of 0.27 Newtons on the z-axis and 0.12 Newtons in the x/y-plane
Moreover, eFlesh incorporates a learning-based slip detection model with a 95% accuracy rate across unseen objects, enabling robots to better detect when an object might slip from their grasp.
Smart Control Enhancements
The tactile data captured by eFlesh enhances robotic manipulation by integrating “visuotactile control policies,” which improve task performance by 40% compared to vision-only systems. These improvements are exemplified in tasks like robotic arm plug insertion and credit card swiping, where precision and sensitivity are crucial.
Democratizing Robotic Tactile Sensing
By sharing fabrication details, 3D files, trained models, and control code openly, the NYU scientists effectively democratize the technology, making sophisticated tactile sensing accessible beyond research labs to hobbyists, educators, and smaller robotics developers.
Conclusion
While the name “eFlesh” might sound unusual, the technology behind it is anything but macabre. This innovation represents a major step in affordable and effective robotic touch sensors, pushing forward the capabilities of tactile robotic manipulation and opening new possibilities for robotics in everyday environments.

