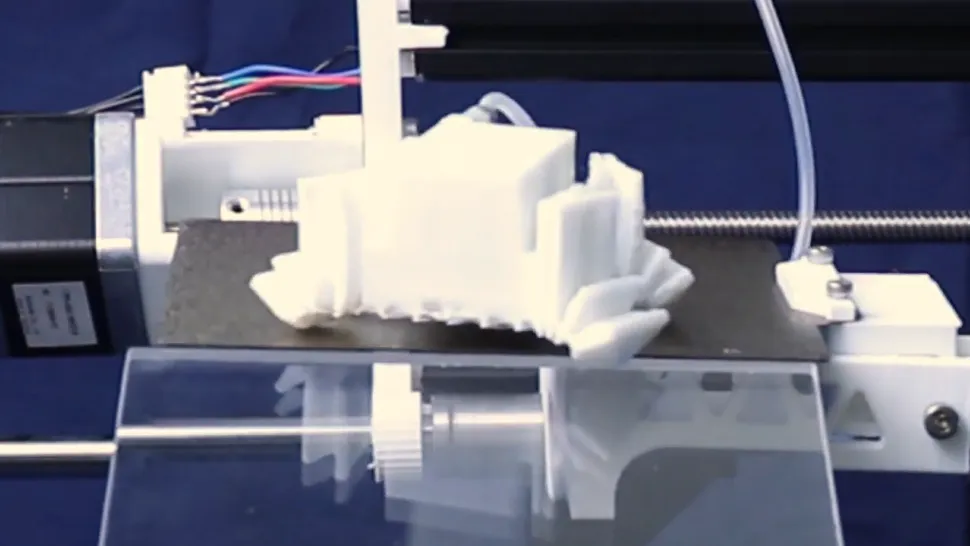
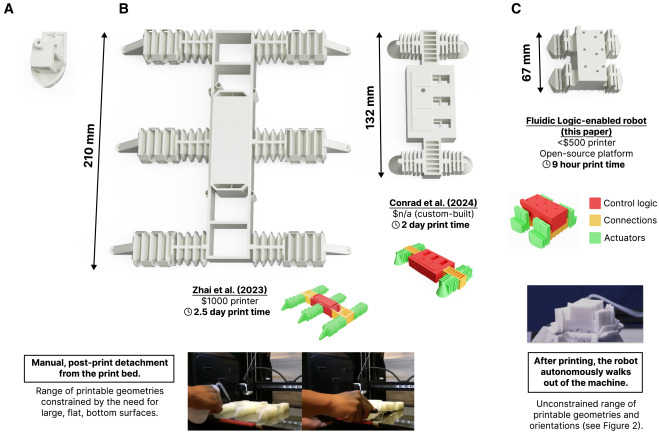
In an impressive leap for robotics and 3D printing, a team from The University of Edinburgh has designed and printed a soft robot capable of walking immediately after being produced by a 3D printer. This innovation marks the first time a 3D-printed soft robot has demonstrated the ability to walk off its own assembly line, offering new possibilities for fluidic soft systems.
The Innovation: A New 3D Printing System for Fluidic Soft Robots
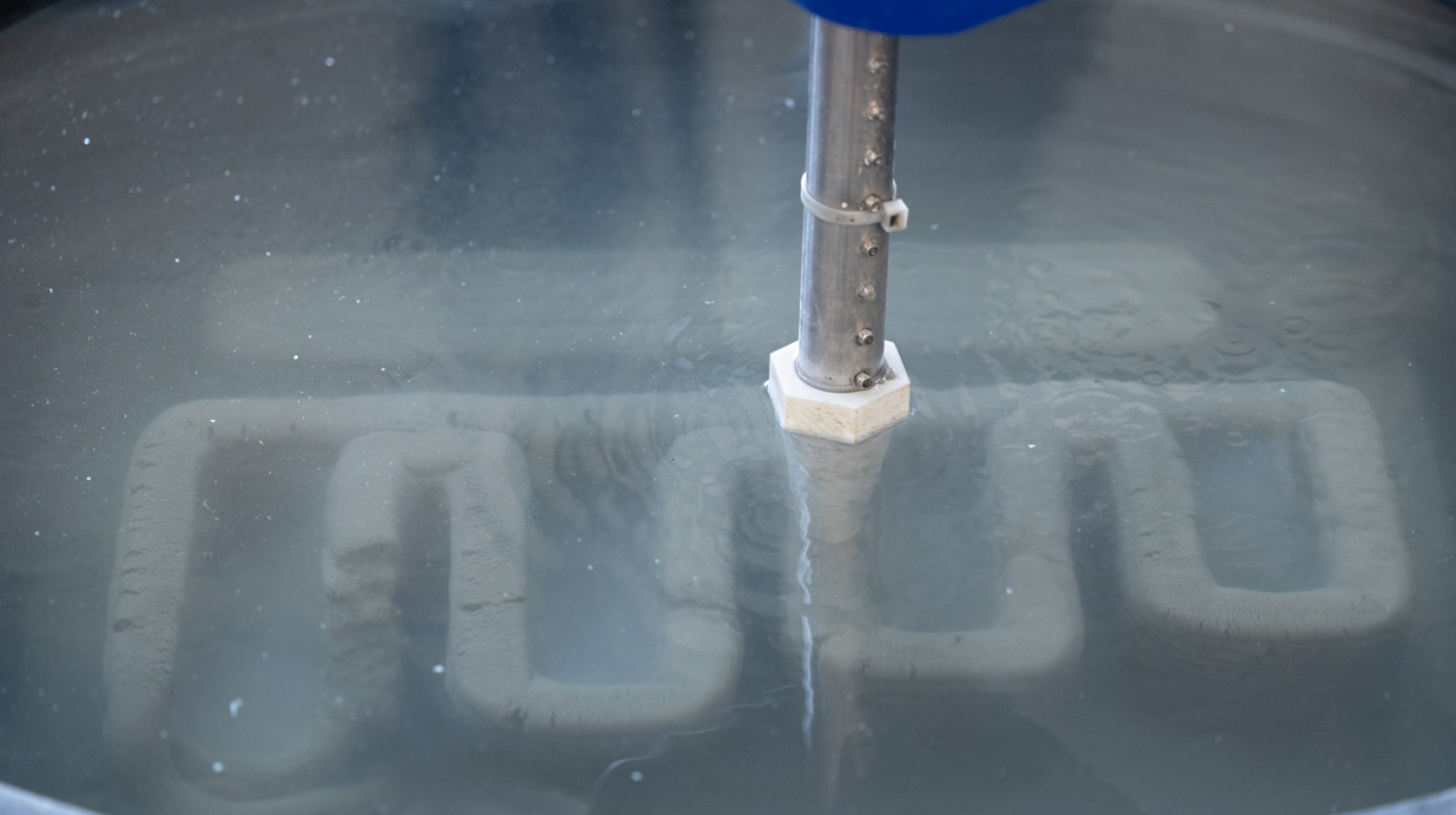
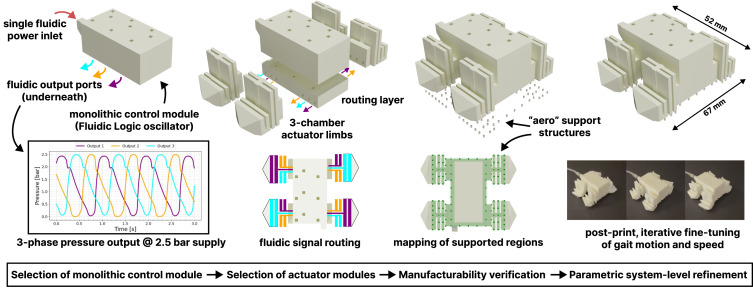
The core achievement lies in the development of a novel 3D printing system tailored specifically for fluidic soft systems. Soft robots like the one created pose significant challenges because they require flexible materials that can handle fluidic engineering components. The team overcame these complexities by devising a unique printing method to produce the flexible channels and structures essential for the robot's movement.
How Does the Soft Robot Walk?
The walking ability of the robot is powered by air pressure. Once printing is complete, a hose is connected to the robot. This hose builds up air pressure that flows through the robot’s 3D-printed internal channels. The pressure causes movements in the robot's structure, enabling it to walk right off the printing machine. This approach represents a strange yet effective method that blurs the lines between manufacturing and robotic operation.
Potential Applications and Future Outlook
The University of Edinburgh team hopes their work will catalyze further developments in fluidic soft robots. Such robots have promising real-world applications where flexibility, adaptability, and soft materials are advantageous. From delicate surgical tools to adaptive handling in manufacturing.
Moreover, the team has made their design open source, encouraging wider experimentation and innovation in the field.
Conclusion
This breakthrough from The University of Edinburgh not only pushes the envelope in combining 3D printing and robotics but also opens new opportunities for fluidic soft systems to enter practical applications. It exemplifies how advancements in flexible materials and novel printing techniques can lead to new classes of robotic devices.