Harvard Researchers Pioneer a Novel 3D Printing Technique in Soft Robotics
A team of engineers at Harvard’s John A. Paulson School of Engineering and Applied Sciences has developed a groundbreaking 3D printing method that enables the creation of fully flexible soft robotic structures capable of twisting and reshaping on demand. This innovative technique, termed rotational multi-material 3D printing, represents a significant evolution in both the fields of 3D printing and soft robotics.
The Innovation: Rotational Multi-Material 3D Printing
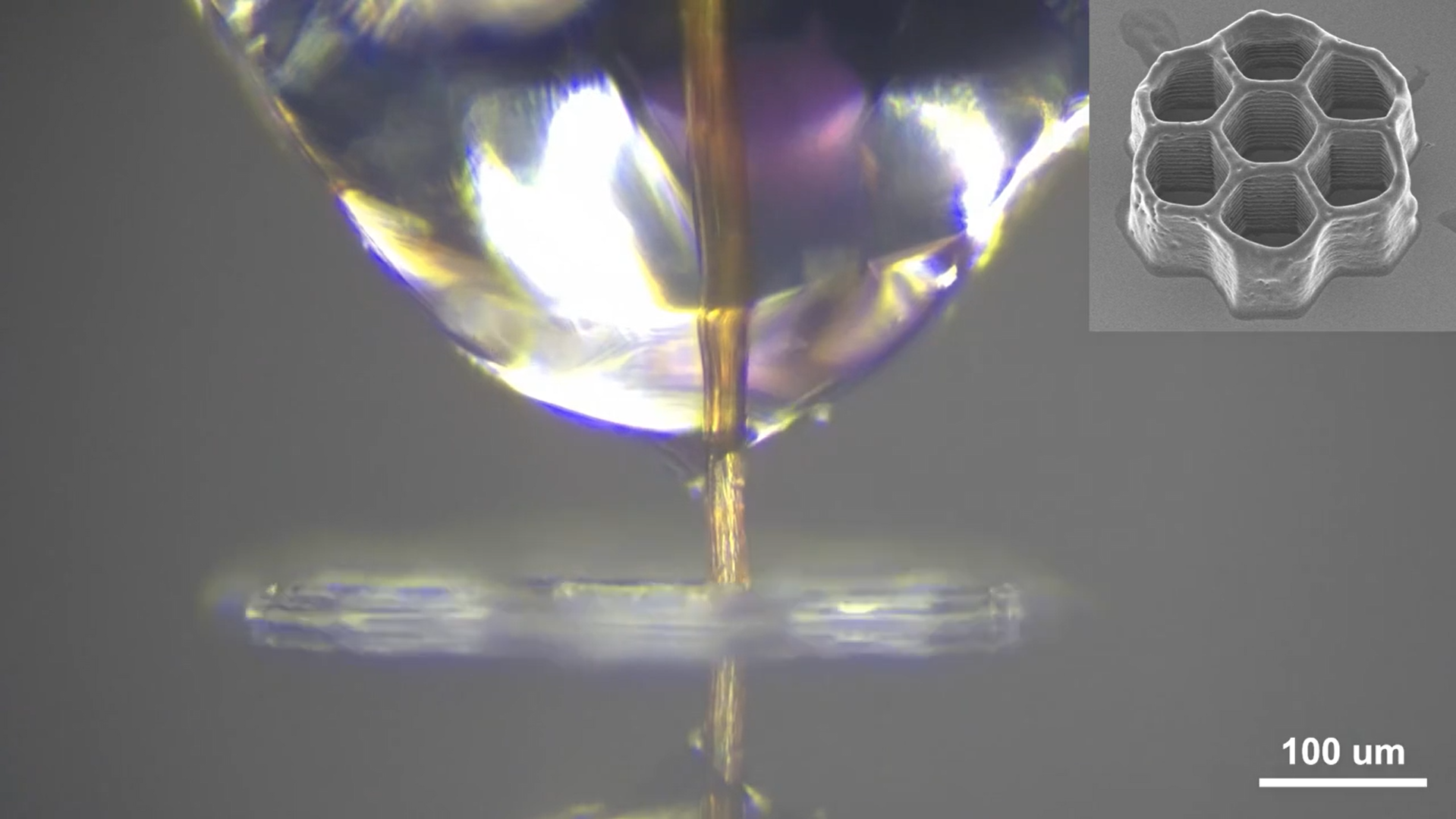
Natalie Larson, a former postgraduate student, and Jackson Wilt, a graduate student, spearheaded the development of this method. Their approach fuses several existing 3D printing methods to print multiple materials simultaneously through a single nozzle that continuously rotates during the printing process.
By precisely controlling the nozzle’s design, rotation speed, and material flow rate, the researchers can dictate how materials combine within the printed structure. This control yields a durable outer layer made of polyurethane, encapsulating an interior poloxamer gel, a polymer substance comparable to hair gel. Once printing concludes, the gel is washed out, leaving hollow tubes that function as artificial muscles. These structures can be actuated by pressurizing them with air or fluids, enabling them to move in sophisticated ways.
Programmable Movement and Complex Structures
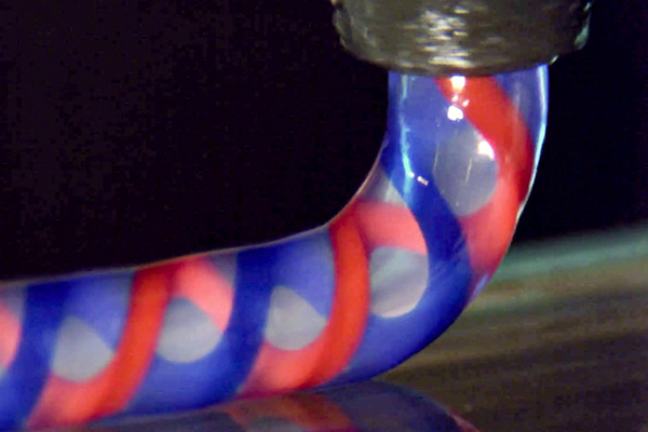
A standout feature of this method is the ability to integrate motion logic directly into the printed design. By manipulating the arrangement of two materials, researchers can program how the structures bend or twist when inflated.
Demonstrations include a flower-like spiral actuator that unfurls upon inflation and a hand-like gripper with curling fingers that wrap around objects, showcasing the method’s capability to create complex, functional designs.
Advantages Over Traditional Methods
This technique could revolutionize soft robotics manufacturing by simplifying and accelerating production. Traditionally, soft robots are made by casting soft materials into molds and layering components, which can be a time-consuming and intricate process.
The new 3D printing method streamlines this by enabling a single print to create complex, malleable structures with built-in movements, potentially facilitating industrial scalability and broader usage across industries.
Future Prospects and Publication
Larson and Wilt’s research has been published in the Advanced Materials journal and is currently subject to a filed patent. Their work promises to propel advances in robotics, potentially impacting various sectors if widely adopted.
In summary, this rotational multi-material 3D printing method offers a fresh perspective on how soft robotic components can be designed and fabricated, introducing efficiency, programmability, and complexity previously unattainable with traditional processes.